


Die Anforderungen an die Produktion der Zukunft sind vielfältig und verändern sich schneller als je zuvor. Im Fokus stehen individuelle Produkte für alle, und das natürlich zu möglichst leistbaren Preisen – also die wirtschaftliche Fertigung mit Losgröße 1. Dieser industrielle Wandel verlangt aber auch ein neuartiges Zusammenspiel von Menschen, Maschinen und Daten – eine Zukunft, die schon begonnen hat.
Neben der digitalen Vernetzung von Anlagen und selbstlernenden Systemen spielen roboterbasierte Automatisierungslösungen, die Hand in Hand mit dem Menschen zusammenarbeiten, eine immer wichtigere Rolle. Der vom Bionic Learning Network entwickelte BionicCobot ist solch ein kollaborativer Roboter.
Er unterstützt den Werker bei eintönigen und ergonomisch belastenden Arbeiten. Außerdem kann er in Bereichen agieren, die für den Menschen gefährlich sind. Und vor allem: Er arbeitet mit Druckluft als Antriebsmedium.
Piezoventile für feinfühlige Robotik
In seinem anatomischen Aufbau ist der Greifarm des Leichtbauroboters dem menschlichen Arm nachempfunden und löst – wie sein biologisches Vorbild – viele Aufgaben mit Hilfe seiner flexiblen, nachgiebigen und feinfühligen Bewegungen. Ideal für die Arbeitsumgebung der Zukunft. Die Regelung des BionicCobot übernimmt unser Motion Terminal VTEM mit ausgeklügelter Piezoventiltechnik an Bord.
Künstliche Intelligenz und Machine-Learning-Methoden machen diesen „BionicWorkplace“ zu einem lernenden und antizipativen System, das sich kontinuierlich selbst optimiert. So kann der Mensch direkt mit dem BionicCobot bzw. seinem Arbeitsplatz interagieren und ihn über Bewegung, Berührung oder über die Sprache steuern.
Wearables zur Positionserfassung
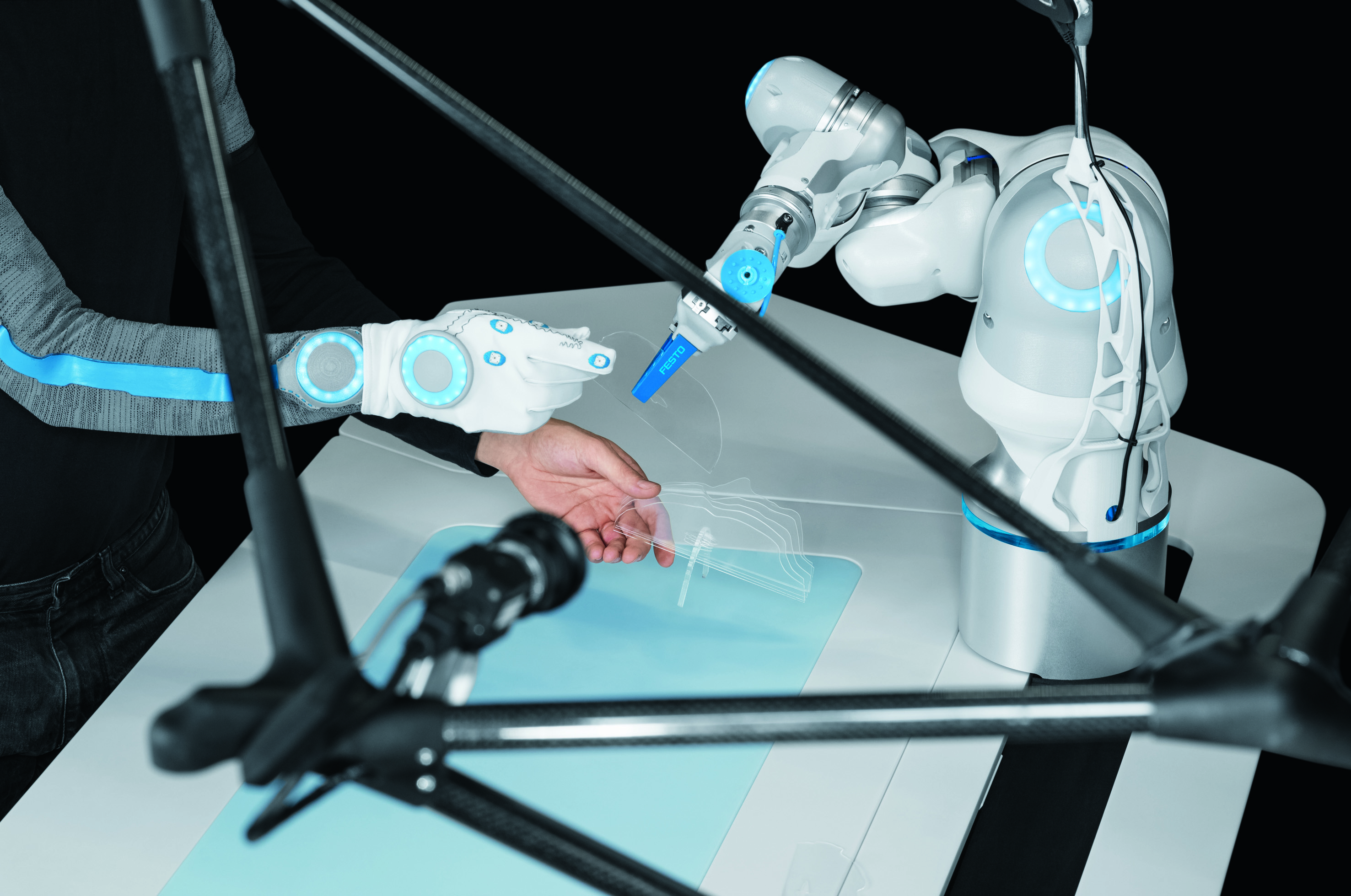
Um die mittig positionierte Projektionsfläche herum sind verschiedene Kamerasysteme angebracht, die permanent die Positionen von Werker, Bauteilen und Werkzeugen erfassen. Den Werker und seine Bewegungen erkennt das System an seiner speziellen Arbeitskleidung.
Diese sehr spezielle Garderobe besteht aus einem Langarm-Oberteil, das mit Inertialsensoren ausgestattet ist, und einem Arbeitshandschuh, auf dem Infrarotmarker sitzen. Alle notwendigen Leitungen sind in das Textil dieser „Wearables“ integriert. Das Zusammenspiel von Kameras und Wearables erlaubt einen sicheren und intuitiven Umgang mit dem gesamten Arbeitsplatz.

Kamerasysteme und Sprachsteuerung
Blickrichtung und Kopfbewegung des Werkers registriert eine spezielle 3-D-Kamera mit Tiefenwahrnehmung. Durch das Augen-Tracking überprüft das System permanent, ob die Aufmerksamkeit des Werkers auf dem Arbeitsplatz liegt. Besteht eine Gefährdungssituation, kann der BionicCobot sofort reagieren.
Lenkt der Mensch seinen Blick auf eine bestimmte Stelle der Projektionsfläche, passt sich hier der Inhalt entsprechend an. Soll der Roboter dem Werker ein Bauteil aus einer ungeordneten Kiste reichen, ermittelt eine zusätzliche Kamera die Koordinaten für die idealen Griffpunkte am Objekt.
Ein weiteres Element für das intuitive Bedienkonzept des BionicWorkplace ist die Sprachsteuerung. Dank einer entsprechenden Software ist das System in der Lage, semantische Details sowie den jeweiligen Sprachkontext zu interpretieren und mit dem Menschen in Dialog zu treten.
Maschinelles Lernen
Hat das Interface die Bedeutung eines Satzes erkannt, gibt es ein so genanntes Context-Objekt aus: einen Software-Code, mit dem die Robotersteuerung arbeiten kann. Für die eindeutigen Handlungsanweisungen an den BionicCobot sorgt dann eine selbstlernende Software mit Künstlicher Intelligenz (KI).
Diese Software wertet den Inhalt des Context-Objekts aus und verarbeitet sämtliche sensorisch erfassten Daten und Inputs der Peripheriegeräte. Mit jeder gelösten Aktion lernt das System weiter dazu. Dabei entsteht eine semantische Karte, die kontinuierlich wächst. So gelangt man von einem programmierten Ablauf nach und nach zu einem freieren Arbeiten.

VR und Co
Zur Fernmanipulation erfasst eine 180-Grad-3-D-Stereokamera den gesamten Arbeitsraum. Gleichzeitig trägt der Werker, der räumlich getrennt agiert, zu den textilen Wearables auch eine Virtual-Reality-Brille. Mit ihr kann er die Bilder der Kamera in Echtzeit abrufen und verfolgen.
So lässt sich der Roboter aus der Distanz steuern, was beispielsweise im Umgang mit gefährlichen Stoffen oder bei gesundheitsgefährdenden Prozessen von Vorteil ist. Auch könnte ein Werker so mehrere Systeme gleichzeitig steuern – selbst, wenn diese in Fabrikanlagen am anderen Ende der Welt oder über den gesamten Globus verteilt sind. Wien ruft San Diego – Robo bitte melden!
TEILEN UND EMPFEHLEN
Hinterlasse einen Kommentar